
我是 施逸天 (Yitian Shi),目前在卡尔斯鲁厄理工学院 (KIT) 物料搬运与物流研究所 (IFL) 攻读博士学位。
我的研究兴趣主要集中在机器人抓取学习、机器人操纵系统以及不确定性估计。
🤖 研究亮点




🔥 新闻动态
- 2026.02: 1 篇论文获得德国机器人会议(GRC) 口头报告(20/244) 🎉🎉
- 2026.02: 3 篇论文被 ICRA 录用 🎉🎉
- 2026.02: 1 篇合作论文被 ICLR 录用 🎉🎉
- 2025.06: 1 篇论文被 IROS 录用 🎉🎉
🎓 教育背景
- 博士研究生, 卡尔斯鲁厄理工学院 (KIT), 物料搬运与物流研究所 (IFL) (2023.10 - 至今)
- 工学硕士 (电动汽车:自动驾驶与联网方向), 斯图加特大学 (2020.10 - 2023.04)
- 工学学士 (机械工程中德合作项目), 富特旺根应用技术大学 (2019.10 - 2020.07)
- 工学学士 (机械工程), 上海理工大学 (2016.09 - 2020.07) (荣誉: 2020年上海市优秀毕业生)
💼 职业经历
- 2023.10 - 至今: 研究助理, 人工智能与机器人组, KIT IFL 研究所
- 2022.11 - 2023.04: 研究助理, 博世人工智能中心 (BCAI), 伦宁根
- 硕士论文: 机器人抓取在线学习中的不确定性驱动探索策略
- 2022.04 - 2022.10: 研究助理, 斯图加特大学信号处理与系统理论研究所 (ISS)
- 论文: 一种用于2D目标检测无监督领域自适应的贝叶斯方法
- 2022.04 - 2022.10: 研究助理, 斯图加特汽车工程与车辆发动机研究院 (FKFS)
🏫 教学工作
- 机器人系统机器学习 1 & 2
- 实践课:机器人机器学习
⚙️ 研究项目
- SFB-1574 循环工厂 (Circular Factory) [项目链接]
📖 学术成果
精选论文
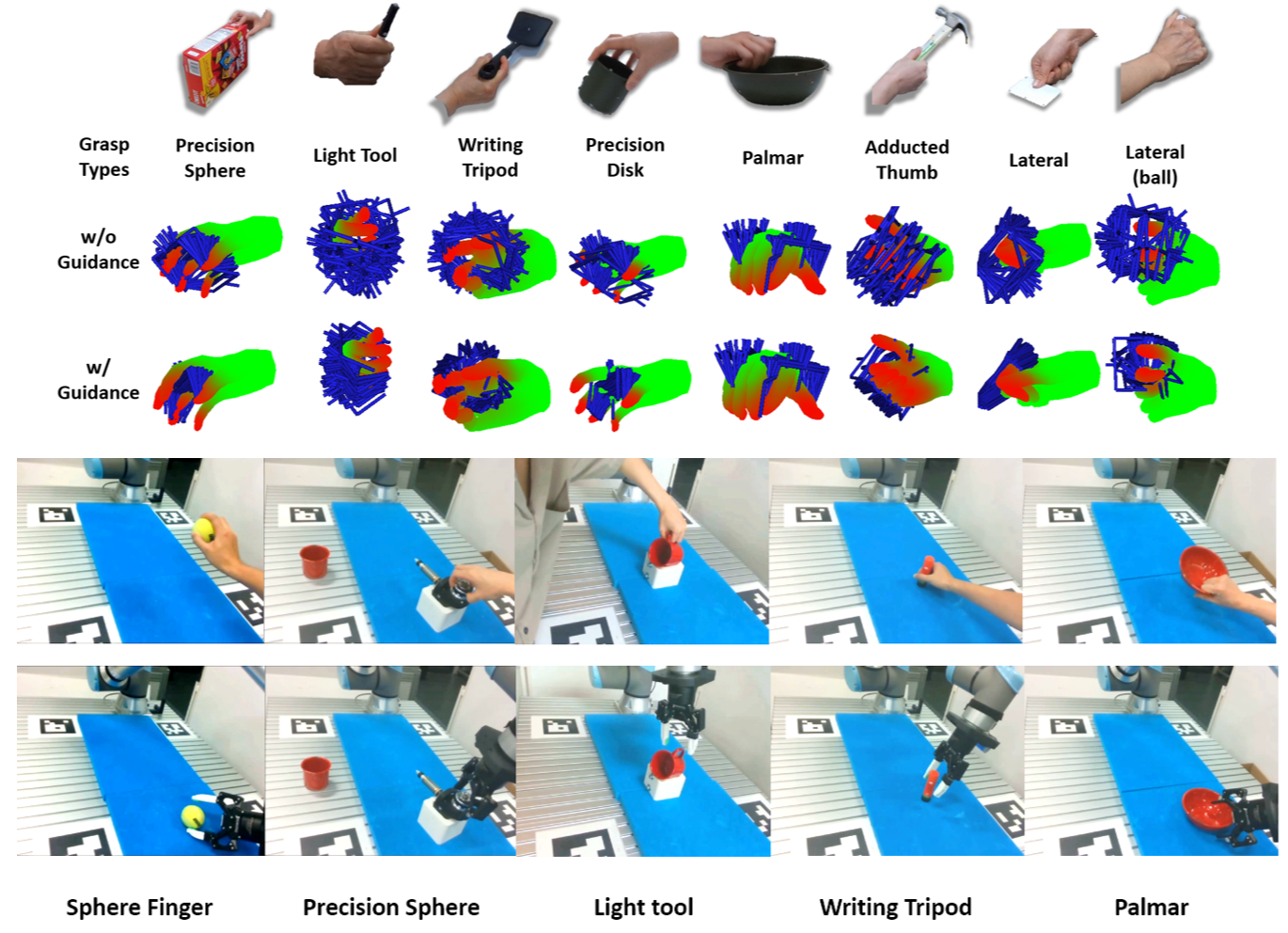
- HOGraspFlow: Taxonomy-Aware Hand–Object Retargeting for Multi-Modal SE(3) Grasp Generation Y Shi, Z Guo, R Wolf, E Welte, R Rayyes 2026 IEEE International Conference on Robotics and Automation (ICRA) [链接]
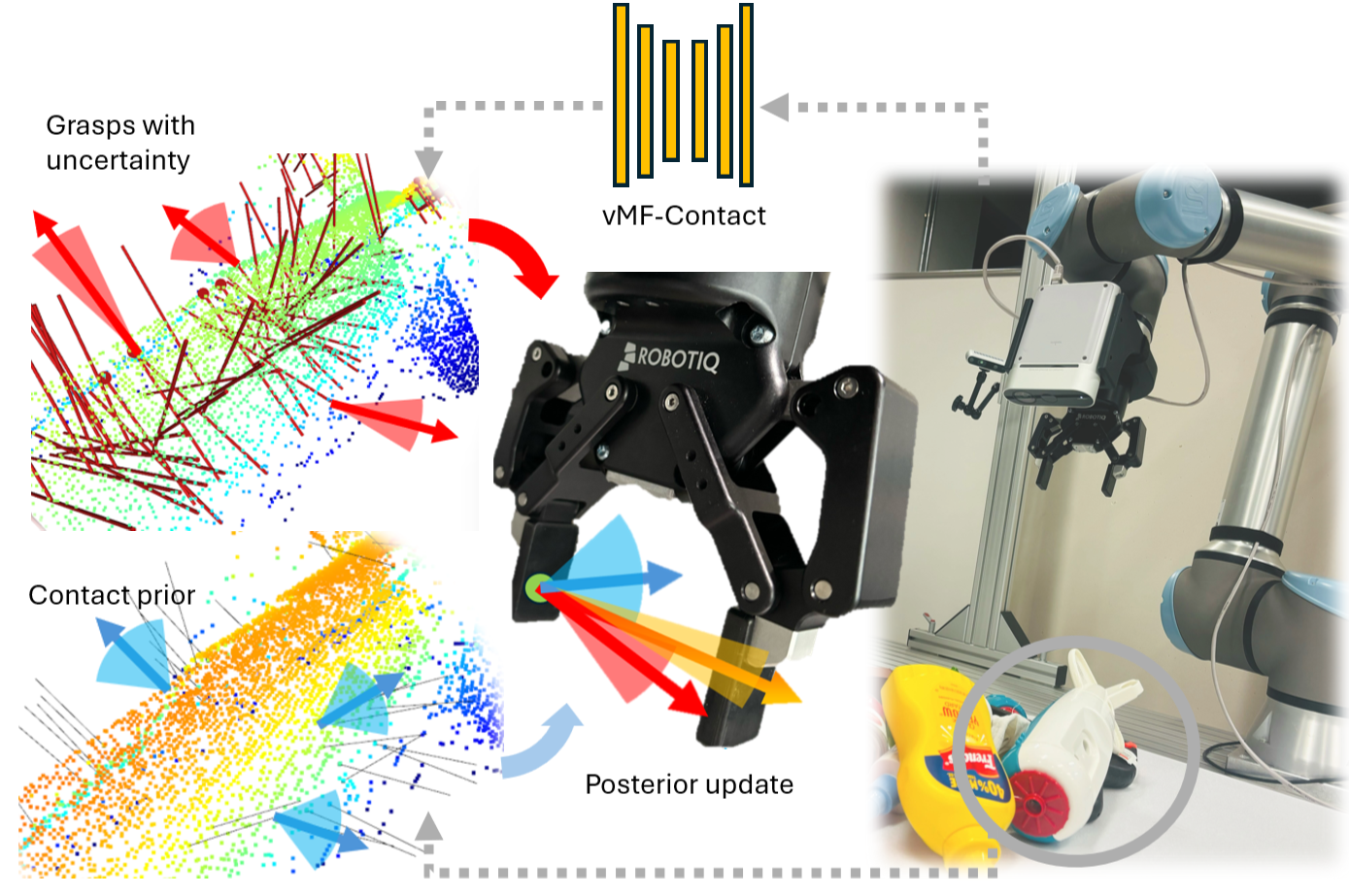
- vMF-Contact: Uncertainty-aware Evidential Learning for Probabilistic Contact-grasp in Noisy Clutter Y Shi, E Welte, M Gilles, R Rayyes 2025 IEEE International Conference on Robotics and Automation (ICRA) [链接]
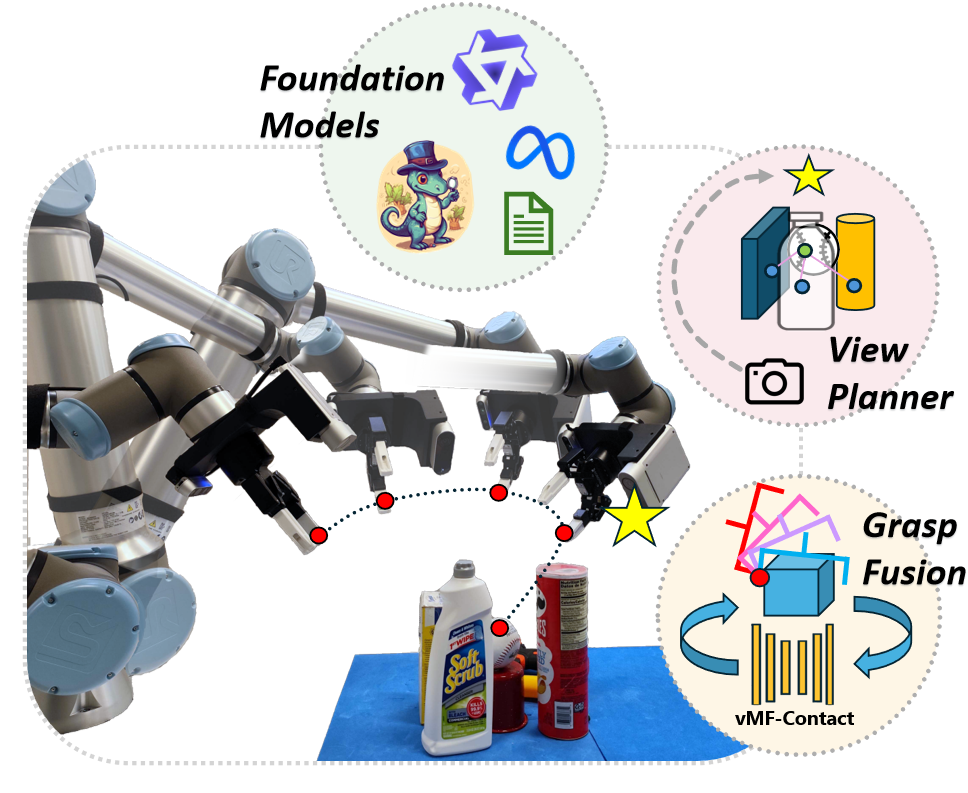
- VISO-Grasp: Vision-Language Informed Spatial Object-centric 6-DoF Active View Planning and Grasping in Clutter and Invisibility Y Shi, D Wen, G Chen, E Welte, S Liu, K Peng, R Stiefelhagen, R Rayyes 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [链接]
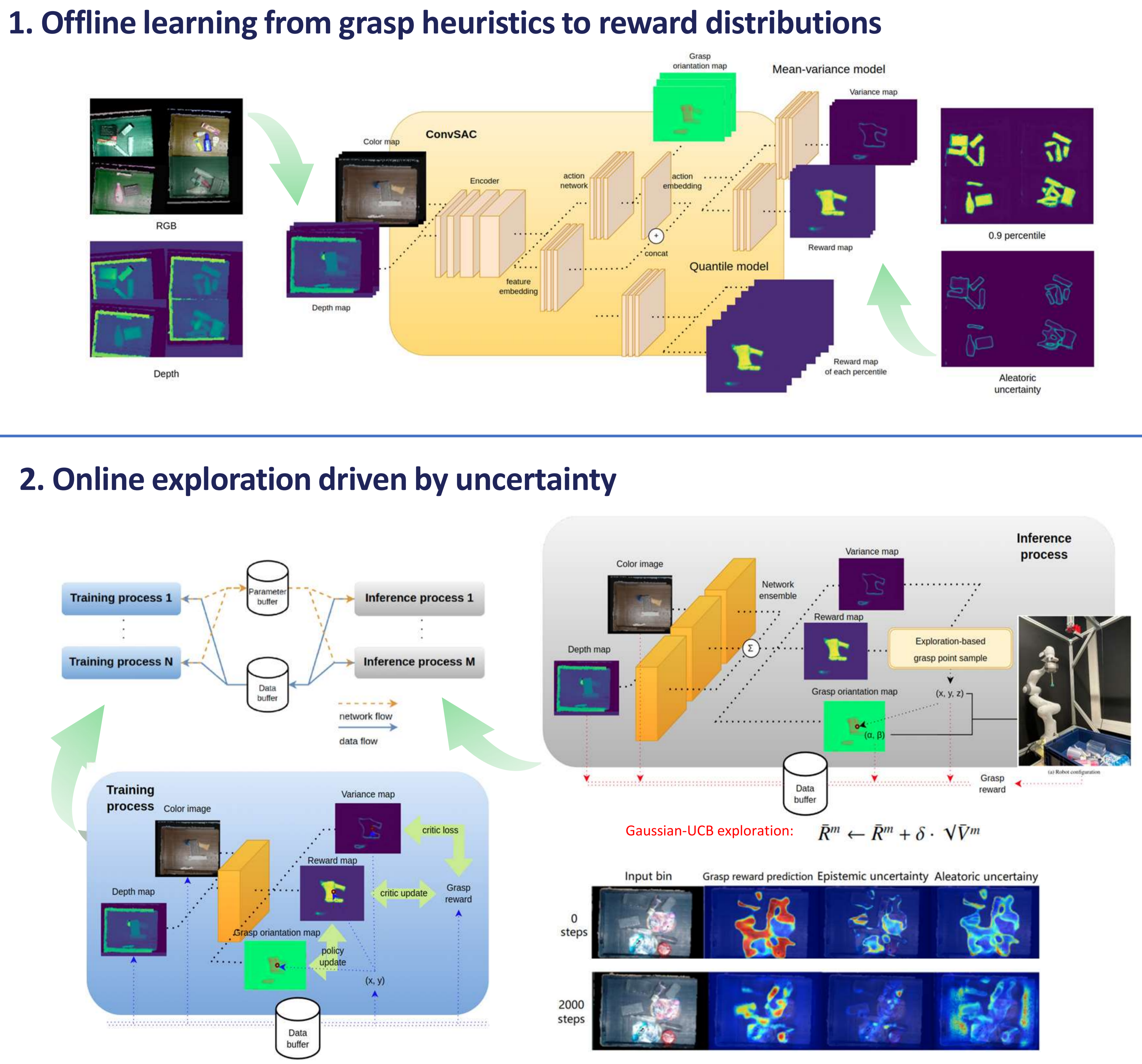
- Uncertainty-driven Exploration Strategies for Online Grasp Learning Y Shi, P Schillinger, M Gabriel, A Kuss, Z Feldman, H Ziesche, NA Vien 2024 IEEE International Conference on Robotics and Automation (ICRA) [链接]
-
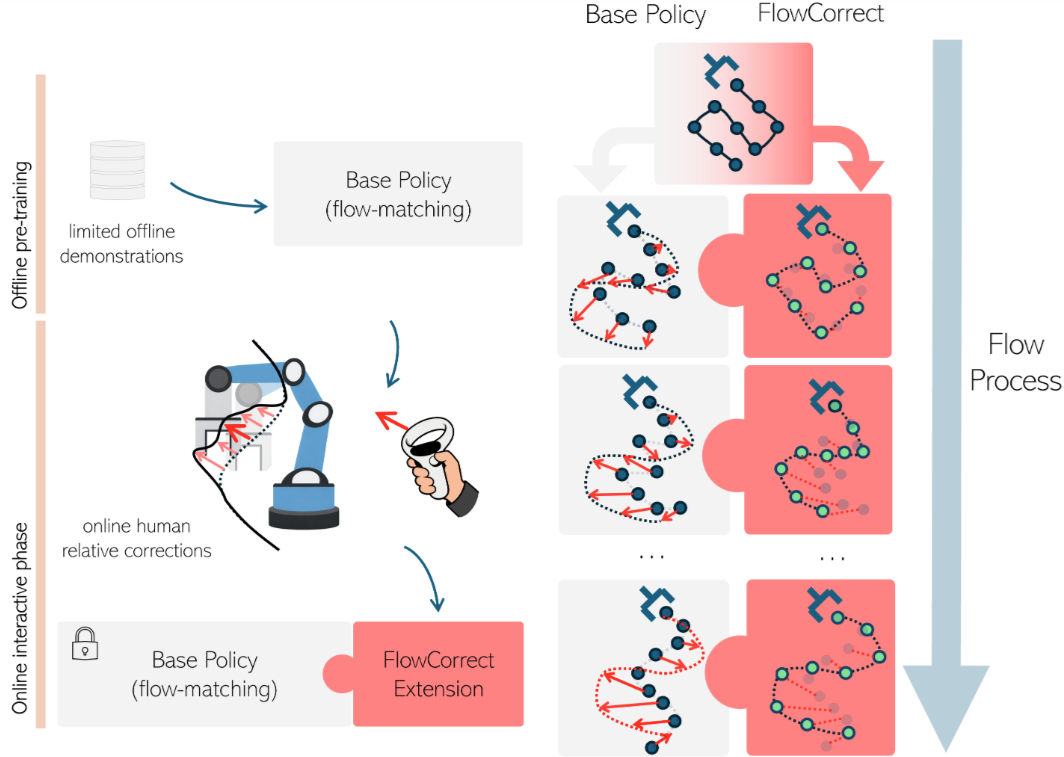
FlowCorrect: Efficient Interactive Correction of Generative Flow Policies for Robotic Manipulation
E, Welte, Y Shi, R Wolf, M Gilles, R Rayyes
under review [链接]
-
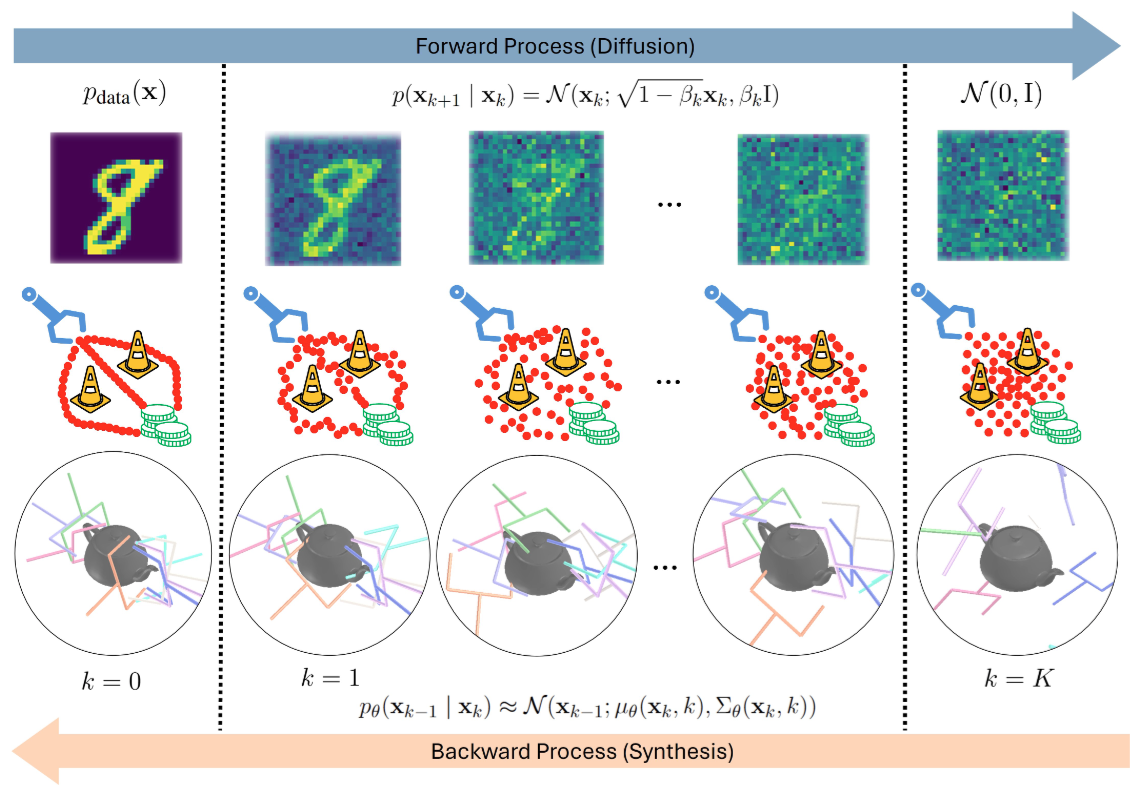
Diffusion Models for Robotic Manipulation: A Survey
R Wolf, Y Shi, S Liu, R Rayyes
Frontiers in Robotics and AI [链接]
-
Go Beyond Earth: Understanding Human Actions and Scenes in Microgravity Environments
D Wen, L Qi, K Peng, K Yang, F Teng, A Luo, J Fu, Y Chen, R Liu, Y Shi, et al.
2026 International Conference on Learning Representations (ICLR) [链接]
-
Human-Interpretable Uncertainty Explanations for Point Cloud Registration
JA Gaus, L Schneider, Y Shi, J Lee, R Rayyes, R Triebel
2026 IEEE International Conference on Robotics and Automation (ICRA) [链接]
-
Mica: Multi-agent industrial coordination assistant
D Wen, K Peng, J Zheng, Y Chen, Y Shi, J Wei, R Liu, K Yang, et al.
2026 IEEE International Conference on Robotics and Automation (ICRA) [链接]
-
A Control Architecture for Robust and Resilient Circular Factories under Uncertain Conditions
F Bail, J Baumgärtner, F Erlenbusch, A Ernst, M Poyer, E Blum, Y Shi, et al.
Procedia CIRP [链接]
-
A Knowledge-Based Intralogistic System for a Circular Factory
JF Klein, R Wolf, A Ernst, Y Shi, P Schumacher, RB Thapa, R Rayyes, et al.
Logistics Journal: Proceedings, 2025 [链接]
工作坊 (Workshop) 论文

- Enhancing Robotic Grasping with Uncertainty-Aware Exploration for Unseen Objects Y Shi, AV Ngo, R Rayyes RSS 2024 Workshop on “Open-Set Robot Perception in the Wild” (最佳论文奖) [链接]