
I am Yitian Shi (施逸天), PhD candidate at the Institute for Material Handling and Logistics (IFL), Karlsruhe Institute of Technology (KIT).
My research interests include robotic grasp learning, robotic manipulation systems and uncertainty estimation.
🤖 Highlights




🔥 News
- 2026.02: Oral presentation in 2nd German Robotics Conference (GRC) (20/244) 🎉🎉
- 2026.02: 3 papers accepted by ICRA 🎉🎉
- 2026.02: 1 co-authored paper accepted by ICLR 🎉🎉
- 2025.06: 1 paper accepted by IROS 🎉🎉
🎓 Education
- Ph.D. Candidate, Institute for Material Handling and Logistics (IFL), Karlsruhe Institute of Technology (KIT) (10/2023 - Present)
- M. Sc. Electromobility (Autonomous and Connected Driving), University of Stuttgart (10/2020 - 04/2023)
- B. Sc. Mechanical Engineering (Sino-German Program), Hochschule Furtwangen, Villingen-Schwenningen (10/2019 - 07/2020)
- B. Sc. Mechanical Engineering, University of Shanghai for Science and Technology (USST) (09/2016 - 07/2020) (Award: College Graduate Excellence Award of Shanghai, 2020)
💼 Professional Experience
- 10/2023 - Present: Research Associate, Artificial Intelligence & Robotics, Institute for Material Handling and Logistics (IFL), KIT
- 11/2022 - 04/2023: Research Assistant, Bosch Center for Artificial Intelligence (BCAI), Renningen
- Thesis title: Uncertainty-driven exploration strategies for online learning in robotic grasping
- 04/2022 - 10/2022: Research Assistant, Institute for Signal Processing and System Theory (ISS), University of Stuttgart
- Thesis title: A Bayesian Approach for Unsupervised Domain Adaptation in 2D Object Detection
- 04/2022 - 10/2022: Research Assistant, Research Institute for Automotive Engineering and Vehicle Engines Stuttgart (FKFS)
🏫 Teaching
- Machine Learning for Robotic Systems 1&2
- Praktikum: Machine Learning for Robotics
⚙️ Project
- SFB-1574 Circular Factory [Link]
📖 Publications
Selected publications
-
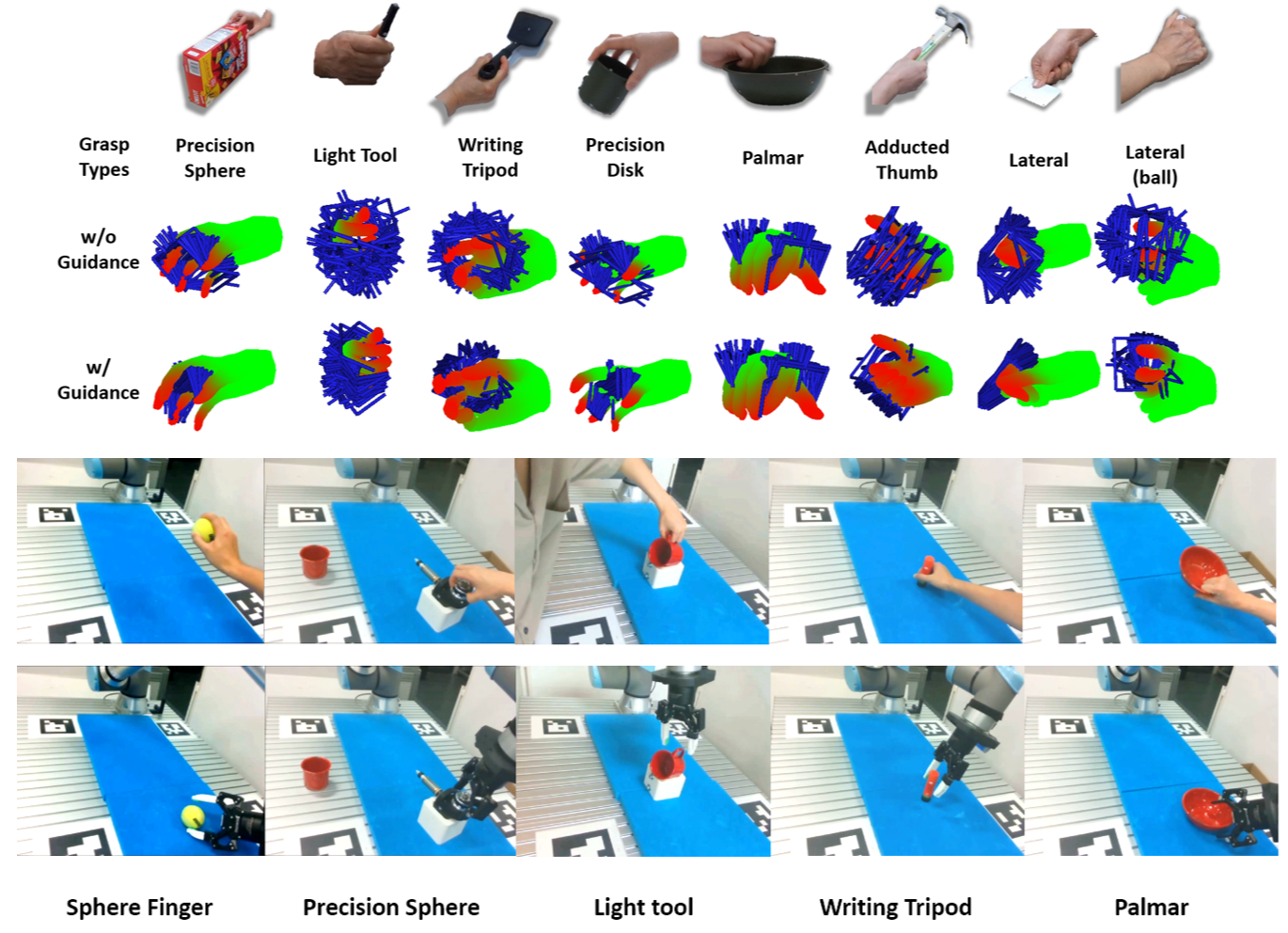
HOGraspFlow: Taxonomy-Aware Hand–Object Retargeting for Multi-Modal SE(3) Grasp Generation
Y Shi, Z Guo, R Wolf, E Welte, R Rayyes
2026 IEEE International Conference on Robotics and Automation (ICRA) [Link]
-
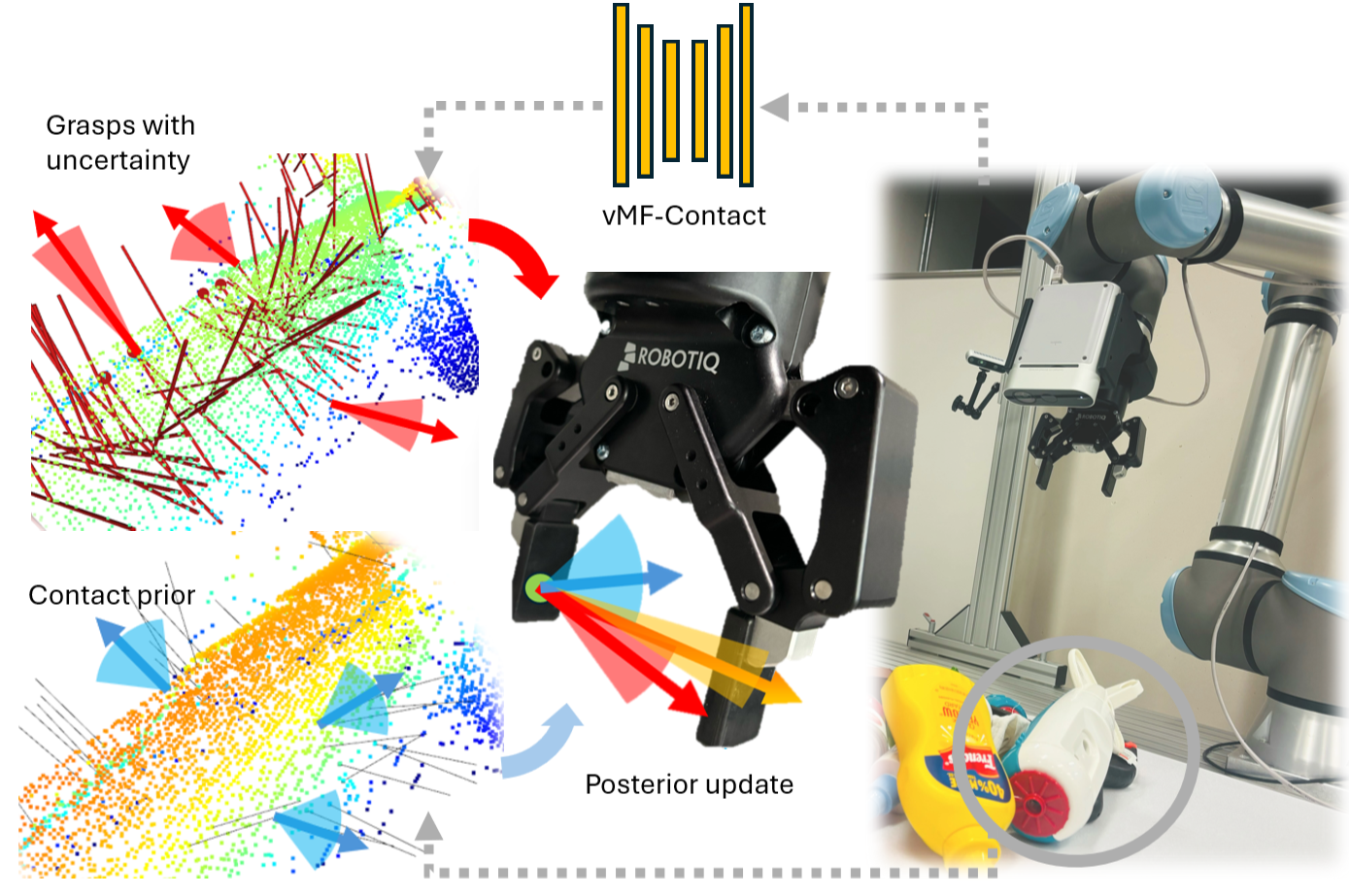
vMF-Contact: Uncertainty-aware Evidential Learning for Probabilistic Contact-grasp in Noisy Clutter
Y Shi, E Welte, M Gilles, R Rayyes
2025 IEEE International Conference on Robotics and Automation (ICRA) [Link]
-
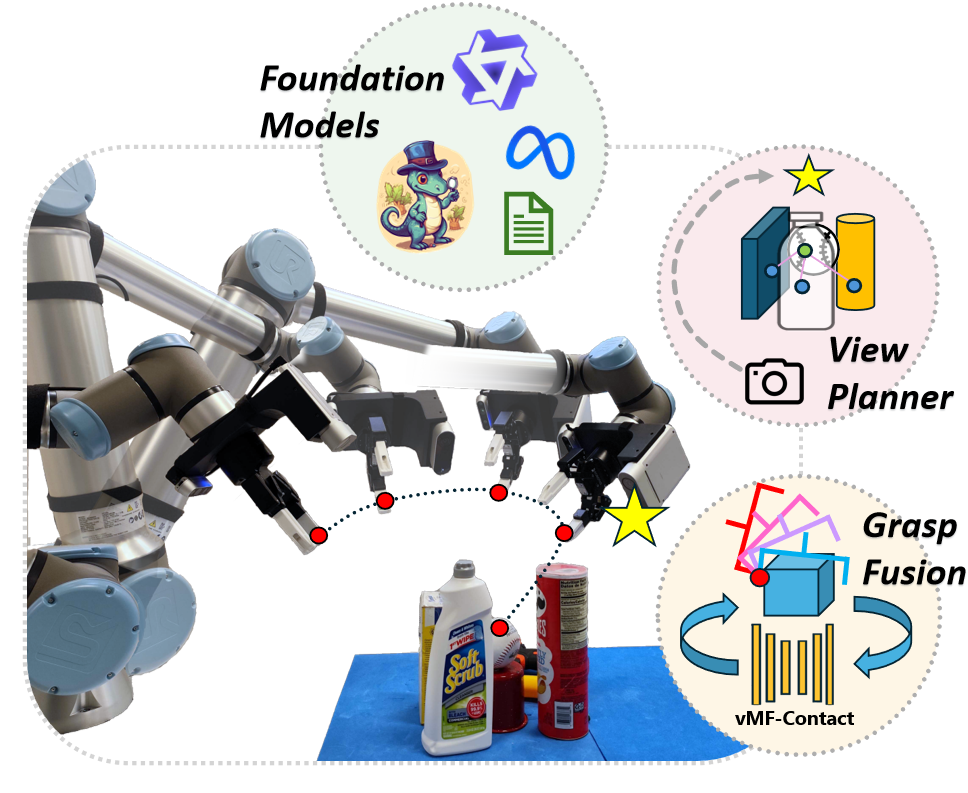
VISO-Grasp: Vision-Language Informed Spatial Object-centric 6-DoF Active View Planning and Grasping in Clutter and Invisibility
Y Shi, D Wen, G Chen, E Welte, S Liu, K Peng, R Stiefelhagen, R Rayyes
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [Link]
-
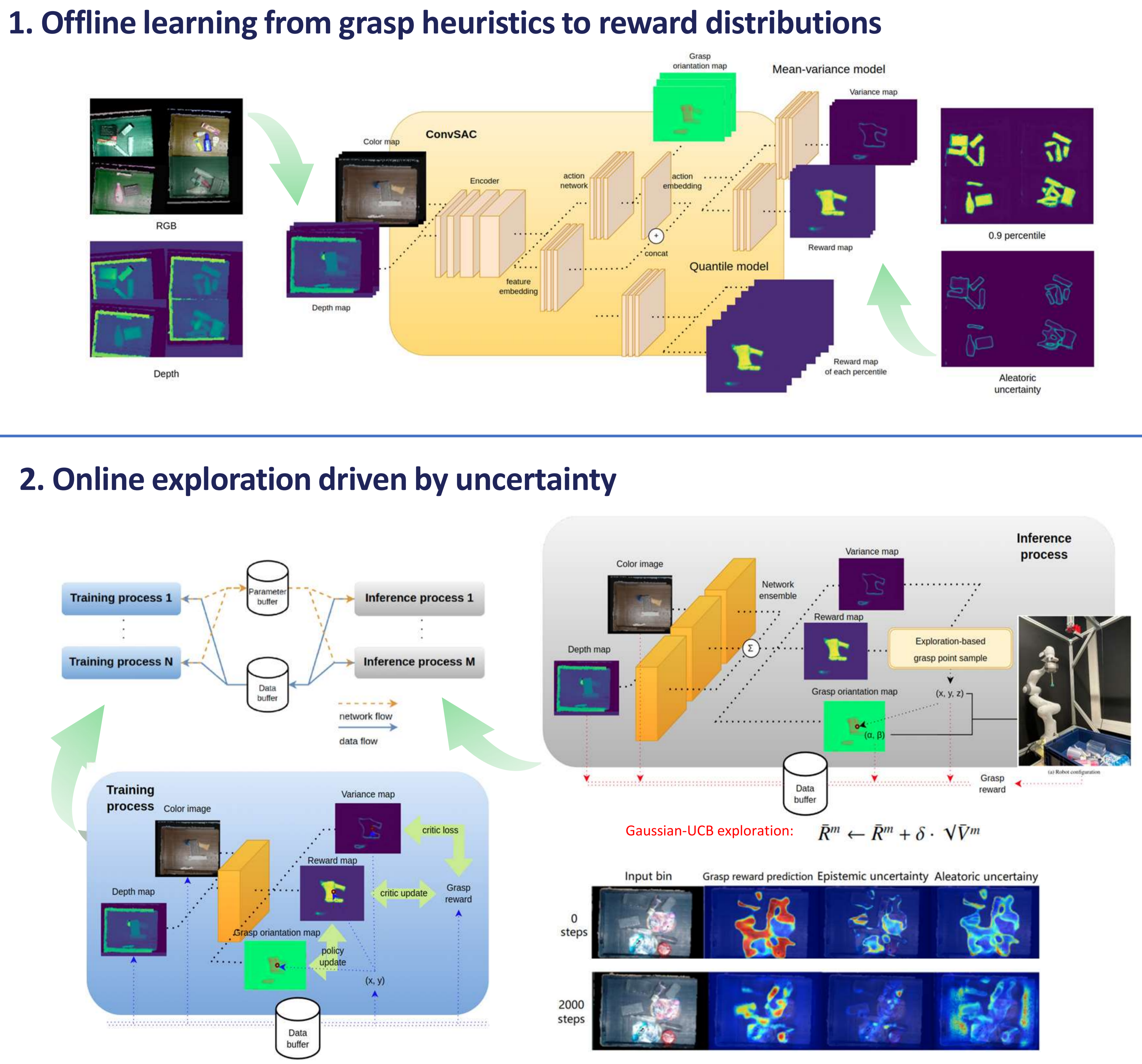
Uncertainty-driven Exploration Strategies for Online Grasp Learning
Y Shi, P Schillinger, M Gabriel, A Kuss, Z Feldman, H Ziesche, NA Vien
2024 IEEE International Conference on Robotics and Automation (ICRA) [Link]
-
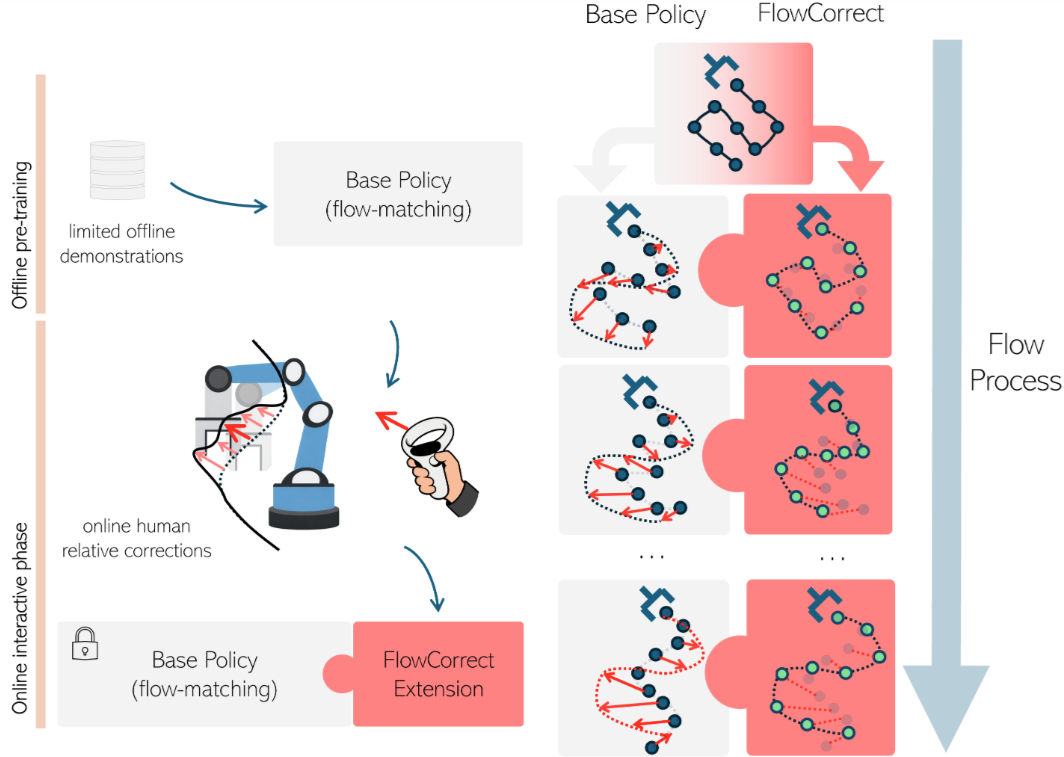
FlowCorrect: Efficient Interactive Correction of Generative Flow Policies for Robotic Manipulation
E, Welte, Y Shi, R Wolf, M Gilles, R Rayyes
under review [Link]
-
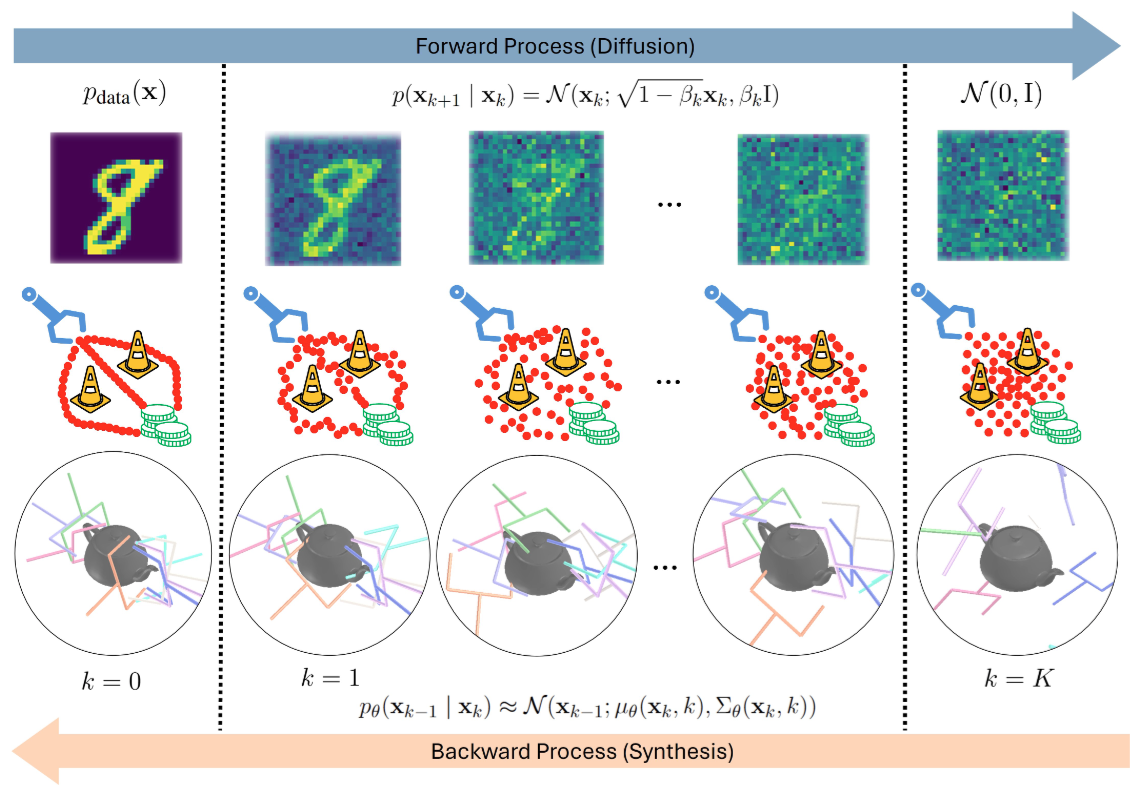
Diffusion Models for Robotic Manipulation: A Survey
R Wolf, Y Shi, S Liu, R Rayyes
Frontiers in Robotics and AI [Link]
-
Go Beyond Earth: Understanding Human Actions and Scenes in Microgravity Environments
D Wen, L Qi, K Peng, K Yang, F Teng, A Luo, J Fu, Y Chen, R Liu, Y Shi, et al.
2026 International Conference on Learning Representations (ICLR) [Link]
-
Human-Interpretable Uncertainty Explanations for Point Cloud Registration
JA Gaus, L Schneider, Y Shi, J Lee, R Rayyes, R Triebel
2026 IEEE International Conference on Robotics and Automation (ICRA) [Link]
-
Mica: Multi-agent industrial coordination assistant
D Wen, K Peng, J Zheng, Y Chen, Y Shi, J Wei, R Liu, K Yang, et al.
2026 IEEE International Conference on Robotics and Automation (ICRA) [Link]
-
A Control Architecture for Robust and Resilient Circular Factories under Uncertain Conditions
F Bail, J Baumgärtner, F Erlenbusch, A Ernst, M Poyer, E Blum, Y Shi, et al.
Procedia CIRP [Link]
-
A Knowledge-Based Intralogistic System for a Circular Factory
JF Klein, R Wolf, A Ernst, Y Shi, P Schumacher, RB Thapa, R Rayyes, et al.
Logistics Journal: Proceedings, 2025 [Link]
Workshop papers

-
Enhancing Robotic Grasping with Uncertainty-Aware Exploration for Unseen Objects
Y Shi, AV Ngo, R Rayyes
RSS 2024 Workshop on “Open-Set Robot Perception in the Wild” (Best Paper Award) [Link]
-
Grasp the Invisibility by Vision-Language guided Active View Planning
Y Shi, D Wen, E Welte, K Peng, R Stiefelhagen, R Rayyes
ICRA 2025 Workshop on “Language and Semantics of Task and Motion Planning” [Link]